WB Electronics- WITU "Markus", 2012
System ten nazwany „Markus” przeznaczony miał być do obserwacji w bezpośredniej strefie działań bojowych. Wykorzystywać miał rakiety systemu „Grad” odpalane z wyrzutni BM-21"Grad" lub WR-40 ”Langusta”. i pochodnych.
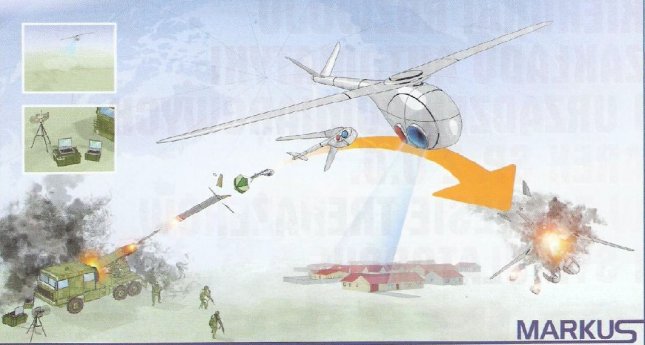
Elementy składowe systemu „Markus”:
- bezzałogowa platforma powietrzna (obiekt latający) wyposażona w czujniki obserwacyjne, umieszczona wewnątrz pocisku rakietowego,
- pocisk rakietowy typu „Grad”,
- stacja kierowania i kontroli umożliwiająca bezprzewodowe sterowanie oraz zbieranie i analizowanie informacji z zamontowanych na platformie sensorów,
- stacja nadawczo- odbiorcza, dzięki której nawiązywana będzie łączność radiowa pomiędzy platformą powietrzna a stanowiskiem naziemnym,
- podsystem logistyczno- transportowy.
Idea użycia systemu miała być następująca: po starcie pocisku rakietowego, następuje rozcalenie pocisku rakietowego na torze jego lotu zgodnie z nastawą czasową elektronicznego zapalnika czasowego zaprogramowanego przed wystrzałem. Po rozcaleniu z pocisku wydobywa się zasobnik zawierający platformę. Zasobnik ten po odpowiednim wyhamowaniu go przez spadochron również jest rozcalany i platforma jest niego wyrzucana. Takie rozwiązanie umożliwiałoby przeniesie platformy na znaczną odległość od miejsca dowodzenia / operowania. Dodatkowa korzyść, to bardzo duża prędkość przelotu oraz niezużywanie energii akumulatorów platformy powietrznej podczas dolotu.
Platforma (po uwolnieniu się z pocisku) miała być w pełni sterowana z poziomu stacji kierowania i kontroli umieszczonej w pobliża wyrzutni. Dzięki: zastosowanym w niej (zamiennie lub jednoczesne) zestawów kamer światła dziennego oraz termowizyjnych możliwe byłoby prowadzenie w czasie rzeczywistym obserwacji obszaru będącego w zakresie zainteresowania.
System miał mieć funkcjonalność wykonywana lotów autonomicznych i trybami lotu wspomagającymi pracę operatora. W czasie trwania misji do stanowiska naziemnego miała być przekazywana informacja o położeniu platformy. W stanowisku naziemnym możliwe byłoby również automatyczne sklejanie kolejnych klatek zapisu wideo w taki sposób, aby stworzyć jedno duże zdjęcie obserwowanego obszaru (zdjęcie wysokiej rozdzielczości).
Latem 2012 r. firma WB Electronics oczekiwała na wynik oceny merytorycznej wniosku.
Źródło:
[1] "System obserwacyjny wynoszony za pomocą pocisku rakietowego". Nowa Technika Wojskowa nr 9/2012.