Fusioncopter FC-4, 2018

W 2012 r. została założona firma Fusioncopter Sp. z o.o., w której zostały podjęte prace nad innowacyjnym projektem czteromiejscowego wiatrakowca dwusilnikowego Fusioncopter FC-4, maszyny idącej o poziom wyżej od dotychczasowych wiatrakowców, które są konstrukcjami zwykle małymi, dwuosobowymi, mieszczącymi się w kategorii ultralekkiej. Budowany był w kategorii specjalnej (docelowo B wg klasyfikacji przepisów CS.27). Była to pierwsza na świecie tej klasy konstrukcja, tak zaawansowana technicznie i przeznaczona na rynek cywilny do operowania w warunkach VFR do lotów dziennych. Głównym konstruktorem został Jarosław Kowalski. Projekt FC-4 otrzymał wsparcie z funduszy Narodowego Centrum Badań i Rozwoju oraz Unii Europejskiej w ramach Programu Operacyjnego Inteligentny Rozwój.
Wiatrakowiec miał posiadać masę startową 1050 kg, w planach jest również wersja o większym udźwigu. Najważniejszą cechą wiatrakowca są jego parametry bezpieczeństwa. Projektant skorzystał z najnowszych osiągnięć techniki światowej oraz opracował własne, unikalne systemy bezpieczeństwa. Dla najwyższego bezpieczeństwa maszyny, została ona wyposażona w dwie jednostki napędowe tak aby potencjalna awaria jednej z nich nie powodowała konieczności nagłego awaryjnego lądowania. Układ konstrukcji FC-4 sprawia, że jego silniki są daleko od kabiny i głównej bryły kadłuba. Oddzielone są stalową grodzią ogniową i przestrzenią pylonu mocowania.
Nietypowość jego rozmiarów powodowała komplikacje w kwestii dostosowania użytkowania konstrukcji do obowiązujących przepisów. Główna część przepisów pochodziła z wymagań dla wiatrakowców małych, oczywiście z odpowiednimi, uzgadnianymi z ULC warunkami specjalnymi, uwzględniającymi większą masę, dwa silniki i szerszy zakres bezpieczeństwa. Przeprowadzono niezwykle obszerny i zaawansowany program badawczo- rozwojowy, który objął swym zasięgiem zarówno wyczerpujące obliczenia teoretyczne jak i intensywne i dogłębne próby praktyczne wszystkich kluczowych zespołów wiatrakowca.
Podstawą dopracowania wstępnej bryły wiatrakowca były badania aerodynamiczne prowadzone przez Politechnikę Lubelską z udziałem Instytutu Lotnictwa w Warszawie. W ramach badań przeprowadzono analizę numeryczną pierwotnej bryły wiatrakowca oraz badania tunelowe modelu w skali 1:20. Wnioski z tych badań posłużyły do dokonania korekt pozycji wiatrakowca w locie, korekt kształtu kadłuba, pylonów nośnych silników, belki ogonowej, usterzenia poziomego i pionowego. Następnie przeprowadzono kolejne badania w tunelu aerodynamicznym Instytutu Lotnictwa w Warszawie celem zdjęcia charakterystyk aerodynamicznych wiatrakowca. Badania te prowadzono na modelu w skali 1:20 oraz 1:10. FC-4 przeszedł próby statyczne, potwierdzające wytrzymałość poszczególnych podzespołów w locie i na ziemi, w tym manewry wyrwania i lądowania awaryjnego z rozbiciem. W ramach projektu FC-4 opracowano nowatorski wirnik autorotacyjny w układzie X, a także nowatorską konstrukcję fotela lotniczego umożliwiającą spełnienie ostrych norm zderzeniowych przy lądowaniu wiropłata z rozbiciem. Oba rozwiązania zostały zgłoszone do opatentowania na terenie Unii Europejskiej i USA.
Prototyp wiatrakowca Fusioncopter FC-4 został ukończony w 2015 r. i w październiku rozpoczęto próby kołowania. Kolejny rok zajęło spełnienie formalności, a potem w następnym rozpoczęto próby w Modlinie. Próby w locie rozpoczęto w czerwcu 2017 r. Najpierw pilot oblatywacz wykonywał podskoki, potem coraz dłuższe przeloty nad pasem. Prototyp został oblatany 08.08.2018 r. Na wiosnę 2019 r. wykonano kilka dłuższych przelotów na pełnej długości pasa z zakrętami, przechylaniem i klasycznym wiatrakowcowym lądowaniem na małym dobiegu. Maszyna podczas prób zachowywała się bardzo dobrze.
Dalszym rozwojem konstrukcji jest dwusilnikowy i czteromiejscowy wiatrakowiec Fusioncopter W04.
Konstrukcja.
Czteromiejscowy, dwusilnikowy wiatrakowiec o konstrukcji mieszanej metalowo- kompozytowej.
Wirnik nośny czterołopatowy (wersja A) w układzie dwóch konwencjonalnych dwułopatowych kołysek ustawionych pod kątem 22,5° do siebie. Wirnik charakteryzuje się stałym skokiem. Oparty na łopatach aluminiowych o cięciwie 200 mm, na profilu NACA 8H12. Napęd prerotacji wirnika poprzez wał giętki z lewego silnika zabezpieczony sprzęgłem jednokierunkowym.
Wirnik nośny dwułopatowy (wersja B) w układzie pojedynczej kołyski. Łopaty aluminiowe o cięciwie 280 mm.
Konstrukcja nośna kadłuba i ogona- duraluminiowa półskorupowa. Owiewki kabiny- kompozyt kewlarowo- węglowy z wypełnieniem honeycomb. Owiewki pozostałej części kadłuba- kompozyt węglowy i miejscowo kompozyt szklany. Maski silnika – kompozyt węglowy sprawdzony w próbach na warunek ognioodporności. Kabina zamknięta z drzwiami lewymi i prawymi, z systemem zrzutu awaryjnego drzwi lewych i prawych.
Usterzenie ogonowe typu H.
Podwozie stałe w układzie jednego koła przedniego i dwóch głównych. W kolejnych wersjach przewidziane podwozie chowane.
Napęd- 2 silniki Rotax 912S o mocy 74 kW (100 KM) każdy. Śmigła dwułopatowe, stałoobrotowe typu MTV-21-A-C-F/CFLD172-05, pchające.
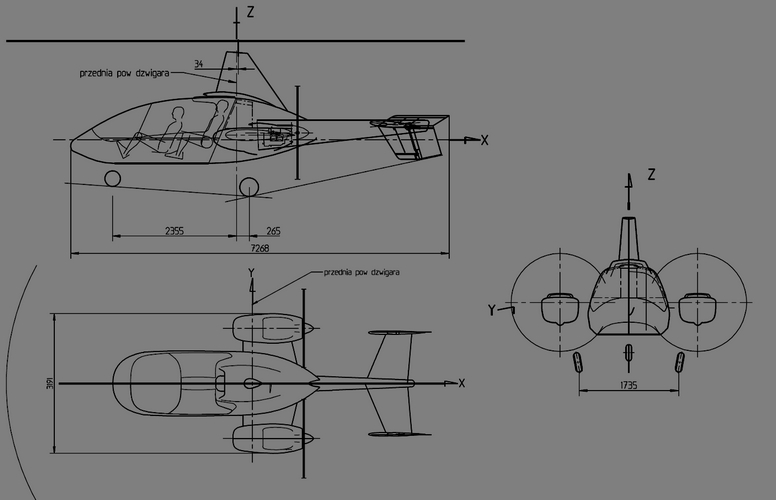
Dane techniczne FC-4 (wg [1]):
Średnica wirnika czterołopatowego (wersja A)- 8,8 m, średnica wirnika dwułopatowego (wersja B)- 11,2 m, długość bez wirnika- 7,268 m, wysokość- 3,009 m.
Masa pustego wiatrakowca (bez wirnika)- 622 kg, masa własna- 721 kg, max ładunek (załoga i ładunek płatny)- 300 kg, max masa startowa- 1050 kg.
Galeria

Źródło:
[1] Fusioncopter NANO.
[2] "Film z oblotu prototypu wiatrakowca Fusioncopter FC4". Portal · dlapilota.pl.
[3] "Fusioncopter: "NANO może latać osoba, która nie ma żadnych uprawnień...". Portal · dlapilota.pl.
[4] "Trwają prace nad wiatrakowcem Fusioncopter FC-4". Portal · dlapilota.pl.
[5] Mikołaj Lech - informacje.