Żurakowski Eksperymentalna łódź żaglowa Model April 1995, 1995
Inż. Janusz Żurakowski, sławny pilot doświadczalny, wycofał się z lotnictwa na początku lat 1960- tych po zamknięciu kontraktu naddźwiękowca Avro Canada CF-105 "Arrow", którego próby w locie prowadził. Oprócz latania jego pasją jest żeglarstwo. Swoją wiedzę z zakresu aerodynamiki lotniczej na początku lat 1990- tych wykorzystał do opracowani założeń do projektu eksperymentalnej łodzi żaglowej, przeznaczonej do pobicia aktualnego rekordu świata prędkości wynoszącego 46,2 węzłów.
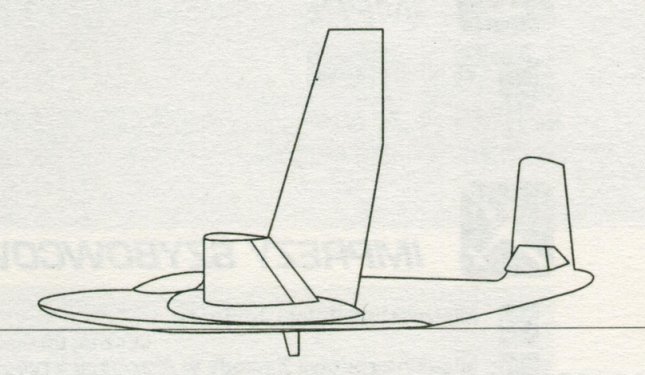
W kwietniu 1995 r. powstał projekt koncepcyjny Eksperymentalnej łodzi żaglowej Model April 1995. Wybrane przeze konstruktora rozwiązanie stanowiło skrzyżowanie szybowca i żaglówki. W celu zapewnienia najwyższych osiągów zostały wzięte pod uwagę następujące czynniki:
- aby efektywnie kreować siłę napędzającą, żagle otrzymały postacie skrzydeł, których struktura jest na tyle sztywna aby zapewnić stałość kształtu profilu,
- przy wyższych prędkościach żagle mają duży współczynnik wydłużenia aerodynamicznego, gdyż odstęp pomiędzy żaglem i skrzydłem poziomym został wyeliminowany,
- żagle powodują silny moment przechylający, który w klasycznych żaglówkach jest równoważony ciężarowo (ciężki kil, przemieszczanie załogi lub balastu jak w katamaranie). Dużo lepszym rozwiązaniem tego problemu jest wyważenie aerodynamiczne za pomocą skrzydeł z lotkami. W tym projekcie skrzydło zostało użyte do sterowania poprzecznego. Na niższych prędkościach siła nośna skrzydła miała spowodować zmniejszenie oporów hydrodynamicznych. Na dużych prędkościach w wodzie pozostają jedynie obrotowy, sterowany kil i małe powierzchnie stabilizujące. Aby zmniejszyć opór aerodynamiczny na dużej prędkości żaglówka ustawia się przeciwnie do pozornego kierunku wiatru (dzięki obrotowemu kilowi). Poprzez wyeliminowanie większej części oporu hydrodynamicznego i wprowadzenie sił aerodynamicznych bardzo efektywnych przy dużych prędkościach byoby możliwe osiągnięcie maksymalnej prędkości ponad 3- krotnie większej niż prędkość wiatru.
Przy ok. 15- 20 węzłach łódź powinna znajdować się całkowicie nad wodą wspierana na podwodnym stabilizatorze poziomym i utrzymywana przez siłę nośną skrzydeł. Na prędkościach bliskich maksymalnej siła nośna skrzydeł równoważy cały ciężar łodzi przy niewielkiej lub braku pomocy stabilizatora. W tych warunkach łódź jest niestabilna i wymaga ciągłego sterowania by utrzymać ją frontem do kierunku wiatru pozornego, z kabiną pilota znajdującą się na właściwej pozycji. Konstruktor przewidywał zastosowanie szybowcowego układu sterowania:
- sterowanie kierunkiem- ster kierunku obsługiwany za pośrednictwem pedałów,
- sterowanie podłużne- ruch drążka w przód i w tył zmienia kąt wychylenia steru wysokości,
- sterowanie poprzeczne- ruch drążka w bok powoduje wychylenie lotek w celu zrównoważenia momentu przechylającego od żagla,
- przed osiągnięciem wysokiej prędkości optymalne położenie kilu i kąta nastawienia żagli reguluje się przy pomocy dźwigni obsługiwanych lewą ręką.
Konstruktor uważał, że dalsze badanie tego typu żaglówki jest uzasadnione, ze względu na tkwiący w niej potencjał uzyskiwania dużych prędkości. Jednak mnóstwo innych problemów właściwych każdemu nowemu projektowi musiałoby zostać jeszcze rozwiązana na drodze badań teoretycznych i doświadczalnych.
Dane techniczne, projektowane (wg [1]):
Rozpiętość skrzydeł- 12,19 m, długość łodzi- 8,38 m, wydłużenie- 10, powierzchnia nośna- 14,86 m2, całkowita powierzchnia żagli- 10,22 m².
Masa całkowita- 294,84 kg.
Galeria

Źródło:
[1] Żurakowski J. "Szybowiec jako żaglówka". Przegląd Lotniczy Aviation Revue nr 5/1995.