Mak-11/Mak-30/Hal-30, 1960
Wobec rychłej perspektywy wprowadzenia pod koniec lat 1950-tych naddźwiękowych samolotów myśliwskich do uzbrojenia lotnictwa polskiego, wynikła potrzeba stosowania celów latających, które mogłyby osiągać również wysokie liczby Macha. Obiekty takie przewidziane były do nauki i treningu w prowadzeniu ognia przez pilotów samolotów przechwytujących oraz do szkolenia obsługi naziemnych urządzeń, przeznaczonych do wykrywania i niszczenia środków napadu powietrznego.
W 1959 r. przystąpiono w Zakładzie Konstrukcji Doświadczalnych Instytutu Lotnictwa do prac konstrukcyjno-badawczych nad bezzałogowym obiektem latającym, mogącym służyć za cel w strzelaniu powietrze-powietrze lub ziemia-powietrze. Głównym konstruktorem był doc. mgr inż. Jerzy Haraźny. Według założeń cel powinien latać na wysokości 10000 m i rozwijać prędkość w zakresie 1,3 do 1,5 Ma, mieć własny napęd odrzutowy, a po wykonaniu zadania powrócić na ziemię na spadochronie.
Ustalono, że najkorzystniej będzie wywozić latający cel podwieszony pod samolotem nosicielem, wyczepić na wysokości operacyjnej, następnie po włączeniu pilota automatycznego i silnika rakietowego rozpędzić do żądanej prędkości, po czym uruchomić napęd główny w postaci bezsprężarkowego silnika strumieniowego. W efekcie przeprowadzonych studiów ustalono geometrię obiektu oraz koncepcję układu napędowego. Miał to być bezzałogowy, zautomatyzowany, dwustopniowy obiekt latający, zaprojektowany w układzie kaczki, z kadłubem o kształcie wydłużonego cylindra, z opływową głowicą i stożkowym tyłem. Dowolnie zaplanowany lot był możliwy do wykonania dzięki zastosowaniu aparatury programującej, sprzężonej z pilotem automatycznym. Nowatorski charakter pracy wymagał rozwiązania szeregu poważnych problemów technicznych z zakresu napędu, mechaniki lotu i sposobu odzyskania obiektu. Ustalono zatem program składający się z pięciu etapów: - I etap- obejmował opracowanie i zbadanie spadochronowego układu odzyskowego do sprowadzenia obiektu z lotu poddźwiękowego na ziemię,
- II etap- zawierał prace nad układem napędu rakietowego i systemem oddzielania się stopnia II z silnikiem przyspieszającym po spaleniu paliwa stałego, - III etap- miał na celu opracowanie i zbadanie spadochronowego układu hamującego, pozwalającego na przejście obiektu z prędkości naddźwiękowej do prędkości poddźwiękowej,
- IV etap- obejmował prace nad układem autostabilizacji w całym zakresie prędkości oraz nad systemem podwieszania i transportu latającego celu pod samolotem nosicielem,
- V etap- zamykał cykl pracami nad przebadaniem napędu głównego, to jest nad bezzaworowymi silnikami strumieniowymi.
W ramach II, IV i V etapu zbudowano trzy różne konstrukcje, bardzo zbliżone do siebie kształtem i masami, ale różniące się wyposażeniem i napędem, zależnie od funkcji, jakie miały spełniać podczas prób i badań w locie. Obiekty latające z tej rodziny miały kolejno oznaczenia Mak-11, Mak-30 i Hal-30. Ostatni był wariantem docelowym. Próby z egzemplarzami makiet latających celów rozpoczęto w 1960 r. Pierwszy z nich Mak-11 różnił się od obiektu docelowego brakiem napędu głównego, zastąpionego makietami, brakiem pilota automatycznego i nieco innym układem usterzenia. Ponadto startował tylko z wyrzutni naziemnej i poruszał się stromym torem balistycznym. Na pułapie- w szczytowej partii lotu wyrzucany był z pojemnika spadochron PD-47, który pozwalał na bezpieczne przyziemienie. Wyposażenie Mak-11 stanowiło łącze telemetryczne i aparatura samopisząca. Mak-11 wykonał dziewięć prób, startując z wyrzutni na poligonie doświadczalnym.
Spadochronowe systemy odzyskowe, opracowane w ramach I i III etapu, zostały poddane badaniom w locie za pomocą specjalnych pojemników typu SPD-1, SPD-3 i SPD-4, podwieszanych pod skrzydłem samolotu doświadczalnego Mikojan MiG-15bis, należącego do Instytutu Lotnictwa. Pojemnik SPD-1 służył do badania w locie 2-go stopnia układu odzyskowego, to jest zmodyfikowanych spadochronów ratowniczych PD-47 i S-2. Pojemnik SPD-4 wykorzystano do badania hamującego spadochronu taśmowego TSH-1, stanowiącego pierwszy stopień układu, a pojemnik SPD-3 służył do badania całego systemu odzyskowego, to znaczy obydwóch spadochronów hamującego i ratunkowego. Pojemniki były wywożone na wysokość operacyjną, a następnie wyczepiane i zrzucane. Wyposażenie pojemników stanowiła automatyka uruchamiająca spadochrony i aparatura pomiarowo-rejestrująca, zapisująca parametry lotu. Dla dopracowania układu odzyskowego wykonano na samolocie MiG-15bis 23 próby z pojemnikami w locie.
Mak-30, w odróżnieniu od Mak-11, był bardziej zbliżony do Hal-30. Pod względem geometrycznym były identyczne, jedynie w miejsce silników strumieniowych zabudowano dwie makiety. Miał również masę całkowitą niższą od obiektu docelowego. Wyposażenie stanowiły: autostabilizacja, łącze telemetryczne i blok aparatury samopiszącej. Jako samolot nosiciel użyty został Iljuszyn Ił-28, będący latającym laboratorium Instytutu Lotnictwa. Próby w locie rozpoczęto od zrzutów samego Mak-30 bez I członu, w celu skontrolowania i dopracowania systemu autostabilizacji przy prędkości poddźwiękowej. Wyczepienie następowało na wysokości 3000 m z prędkością ok. 500 km/h. Lot ślizgowy trwał około 40". Następnie na wysokości 1100 m następowało przesterowanie skrzydełek na duże kąty natarcia, celem przejścia do lotu wznoszącego i zmniejszenia prędkości poruszania się obiektu. W 20 sekundzie lotu, na wysokości 2400 m i przy prędkości ok. 250 km/h, następowało otwarcie spadochronu hamującego, a na wysokości 400 m wyrzucenie spadochronu ratunkowego. Przyziemienie następowało w odległości 8500-9500 m od punktu wyczepienia.
Następny etap obejmował próby w locie Mak-30 w układzie dwustopniowym, z pracującym silnikiem rakietowym. Samolot nosiciel, wraz z podwieszonym latającym celem, osiągał wysokość operacyjną 10000 m, wówczas uruchamiano automatykę obiektu, po czym następowało wyczepienie Mak-30 ze sterami zablokowanymi w położeniu neutralnym. Po 5-sekundowym locie balistycznym uruchamiał się automatycznie silnik rakietowy, zwiększając prędkość lotu do zaplanowanej wielkości maksymalnej. Po wypaleniu ładunku prochowego następowało odłączenie się bezużytecznego członu I. W chwilę potem włączał się pilot automatyczny, stabilizując obiekt i zapewniając lot poziomy, po czym po zmniejszeniu prędkości obiekt przechodził w lot ślizgowy. Na wysokości 7000 m automat ciśnieniowy otwierał spadochron hamujący, a na wysokości 2000 m spadochron ratunkowy, zmniejszając prędkość spadania do 12 m/s. Z obiektem Mak-30 wykonano 6 prób w locie, przy użyciu samolotu Ił-28.
Obiekt docelowy Hal-30 różnił się od Mak-30 pracującymi silnikami strumieniowymi, zabudowanymi w miejsce makiet. Tor lotu był podobny do Mak-30, z tym że w momencie odczepienia I członu z wypalonym silnikiem rakietowym włączały się automatycznie silniki rakietowe, a obiekt rozpoczynał stabilizowany lot poziomy ze stałą prędkością. Po wyczerpaniu paliwa Hal-30 przechodził w lot ślizgowy, schodząc z wysokości operacyjnej 9000 m do 7000 m. Na tej wysokości automat ciśnieniowy wyrzucał spadochron hamujący i dalej lot przebiegał jak przy Mak-30. Odnalezienie Hal-30 ułatwiała radiolatarnia, rozpoczynająca pracę po otwarciu spadochronu ratunkowego.
Realizacja przedsięwzięcia nastręczała wiele trudności technicznych zarówno w fazie projektowania, jak podczas badań i prób w locie. Pomimo znacznego zaangażowania potencjału Instytutu Lotnictwa, temat ten nie doczekał się pełnego rozpracowania. Pod koniec 1964 r. przerwano prace, zamykając je na etapie zakończonych prób układu odzyskowego, przebadanego systemu członu I, znacznego zaawansowania w locie prób autostabilizacji i rozpoczynających się poligonowych prób w locie obiektu Hal-30. Marszowe silniki strumieniowe były już przebadane w hamowni stacjonarnej.
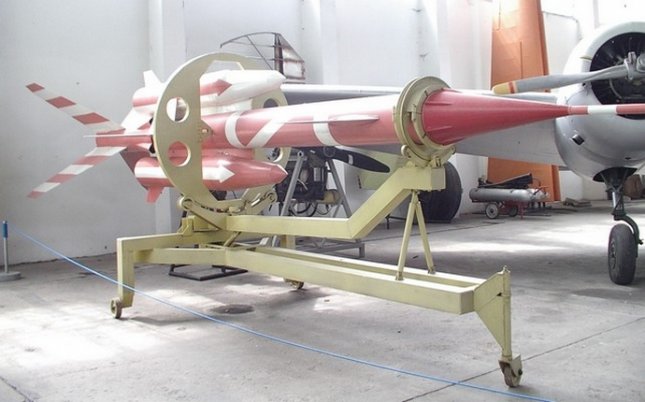
W międzyczasie wyrzutnię po Mak-11 przeniesiono na poligon do Łeby, gdzie nadal służyła do prób z rakietami meteorologicznymi typu "Meteor". Kompletny Mak-30 został natomiast przekazany w dniu 18.01.1968 r. do Muzeum Lotnictwa i Astronautyki w Krakowie. Razem z latającym celem przekazano makiety dwóch marszowych silników strumieniowych, rakietowy silnik przyspieszający, stanowiący I stopień układu, i laboratoryjny stół montażowy, a ponadto trzy pojemniki do badań systemu odzyskowego.
Konstrukcja:
Bezzałogowy naddźwiękowy obiekt latający przeznaczony jako cel latający. Dwustopniowy, znacznie wydłużony kadłub, miał konstrukcję całkowicie metalową i usterzenie w układzie kaczki.
Kadłub II członu miał kształt cylindryczny, z wrzecionowatą głowicą i lekko stożkowym tępo ściętym tyłem. W pionie nad i pod kadłubem zamocowane były dwa marszowe silniki strumieniowe. W przodzie znajdował się ruchomy ster wysokości, a w tyle nieruchome stateczniki poziome. Zarówno jedne, jak i drugie miały obrys trójkątny. W tylnej części silników umocowane były dwa szczątkowe stateczniki pionowe, zapewniające właściwą stabilizację kierunkową. Człon I z przyspieszającym silnikiem rakietowym dołączony był i zapięty specjalnymi zamkami do tyłu kadłuba członu II. Był on wyposażony dodatkowo we własne stateczniki w układzie krzyżowym, zapewniające właściwy zapas stateczności w dwustopniowym układzie obiektu.
Zespół napędowy stanowiły trzy silniki: jeden rakietowy na paliwo stałe spełniający funkcję przyspieszacza i dwa bezsprężarkowe silniki strumieniowe o ciągu 1,28 kN (130 kG) każdy, stanowiące podstawowe źródło napędu.
Wyposażenie: bateria akumulatorów elektrycznych, umieszczonych w głowicy, pilot automatyczny i mechanizmy sterowania, znajdujących się w przedniej partii kadłuba, 32-kanałowy nadajnik telemetryczny i blokowy zespół pomiarowej aparatury samopiszącej, mieszczących się w środkowej części kadłuba, oraz automatyka programująca i dwustopniowy układ odzyskowy, usytuowane w tyle kadłuba. Układ odzyskowy składał się z taśmowego spadochronu hamującego TSH-1 i spadochronu ratunkowego S-2.
Dane techniczne Mak-11 (wg [1]):
Masa startowa II członu z pełnym wyposażeniem- 175 kg, masa startowa I i II członu- 318 kg.
Prędkość max- 1200 km/h, wysokość lotu max- 3600 m, czas pracy silnika rakietowego- 3", czas osiągnięcia pułapu- 22", , kąt odstrzału- 80°.
Dane techniczne Mak-30 (wg [1]):
Długość I i II członu- 7,912 m, długość II członu- 6,275 m, średnica kadłuba- 0,3 m, rozpiętość stateczników I członu- 2,005 m, rozpiętość stateczników II członu- 1,6 m.
Dane techniczne Hal-30 (wg [1]):
Długość I i II członu- 7,912 m, długość II członu- 6,275 m, średnica kadłuba- 0,3 m, rozpiętość stateczników I członu- 2,005 m, rozpiętość stateczników II członu- 1,6 m.
Masa startowa członu II z pełnym wyposażeniem- 360 kg, masa startowa I i II członu- 500 kg, wysokość wyczepienia- 10000 m, prędkość początkowa- 700 km/h,,wysokość lotu operacyjnego- 9000 m, prędkość operacyjna- 1,5 Ma, czas pracy silnika rakietowego- 6", czas pracy silników strumieniowych 60", prędkość przyziemienia na spadochronie- 18 m/s.
Galeria

Źródło:
[1] Morgała A. ”Polskie samoloty wojskowe 1945-1980”. Wydawnictwo MON. Warszawa 1980.